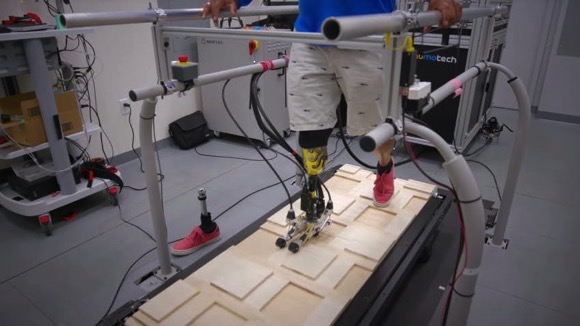
适应越野路面的义肢足

现在的义肢足很难想人类的脚丫那样去适应崎岖不平坦的路面。斯坦福大学的研究者设计的义足包含三个橡胶接触点 - 两个前“脚趾”和一个后“脚跟”。当佩戴者走路时,集成的传感器检测当义足碰到地面时施加在这些点上的压力(或缺乏压力)。利用电动马达,脚趾/脚跟通过独立地向上或向下移动来响应 - 这样,它们在彼此之间转换压力以保持在倾斜处的地面接触,同时不让义足在凸起处倾斜失去平衡。

本期主题栏目有
用设计启迪儿童智慧
专题产品设计、学术论文等
欢迎订阅
投稿方式
《工业设计》杂志官网(www.gysjqk.com)可在线投稿



